top of page
WB-SEXY
DE BOUW
Bouw: Welcome
Bouw: News
TEAM RAILS
Bart, Bram en Bram
Bouw: News

Op het moment dat het was vastgelegd dat een rails het systeem was dat we zouden gebruiken voor de horizontale beweging van de grijper zijn wij daar als team meteen mee aan de slag gegaan. We hebben passende onderdelen van het mechanisme uitgewerkt en gekocht.
Bouw: News

We hebben berekend hoe lang elk onderdeel van het schaarmechanisme hoorde te zijn en dat in Solidworks getekend. We hadden zoveel PMMA nodig dat we een extra plaat hebben gekocht en deze apart hebben laten lasersnijden bij het IWS.
Bouw: News

Bouw: News
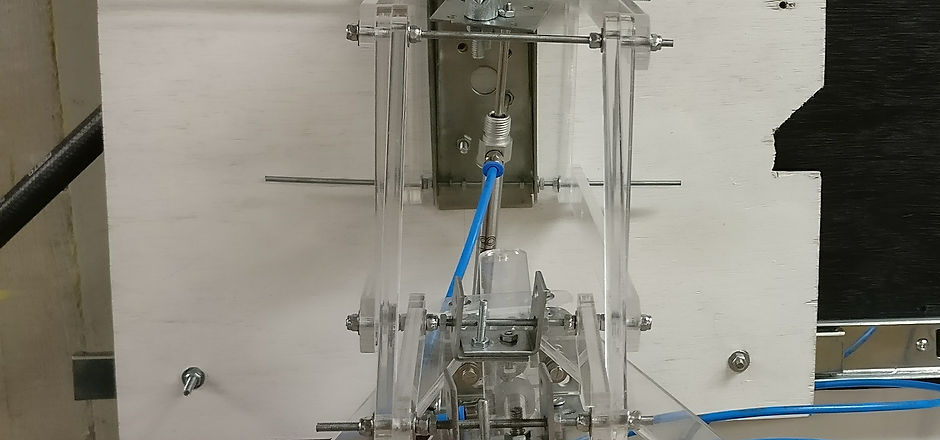
Het in elkaar zetten van de rails en een werkend mechanisme was echter een uitdaging, in theorie was het een goed ontwerp, maar in de praktijk bleek hij het niet te doen. Er was te veel wrijving tussen de moeren en het PMMA waardoor het simpelweg veel te zwaar werd voor de actuatoren om genoeg kracht te leveren zodat de grijper horizontaal kon bewegen. Als ons laatste redmiddel hebben we geprobeerd de speling te verminderen met behulp van elastiekjes, helaas maakte dat niet veel verschil.
Bouw: News

Daarnaast zijn we bezig geweest met het boren van de gaten en uitlijnen van de rails bij Bart thuis. Ook daar zijn wat kleine boorfoutjes gemaakt en moesten we 2 keer nadenken over onze volgende stap en of er niet nog een factor was waarmee we rekening moesten houden bij het ontwerp.
Bouw: News
Uiteindelijk zijn we op een driestangenmechanisme gekomen die voor minder wrijving zou moeten zorgen en toch dezelfde afstand kan afleggen. Het PMMA is in eerste instantie uitgesneden voor een ander ontwerp dus deze toepassing van het PMMA is niet optimaal maar gelukkig werkt dit ontwerp wel.
Bouw: News
TEAM ARM
Anton en Tibbe
Bouw: News

Eerst heeft iedereen een concept voor de arm gemaakt die wij punten hebben gegeven om zo het beste concept te kiezen. Dit is te vinden bij ontwerpen onder het kopje concepten en proefmodellen. Wij hebben vervolgens een spuugmodel van lego van gemaakt om te kijken of het gekozen concept ook daadwerkelijk goed werkt. Hierna zijn wij gelijk begonnen met het maken van het model in Solidworks en het maken van de onderdelen in het lasersnijbestand.

Toen wij onze onderdelen kregen kwamen wij erachter dat wij een essentieel punt over het hoofd hadden gezien. Wij hadden niet goed nagedacht over de verbindingsmogelijkheden van de arm. Gelukkig konden wij met extra onderdelen het grijpmechanisme toch goed vastmaken aan de arm. Dit is echter wel een goed leerpunt geweest voor de volgende keer.
De beweging waar de arm voor moet zorgen is de beweging omhoog en naar beneden. Ons ontwerp is echter redelijk zwaar. Oorspronkelijk konden wij dit oplossen door de grote, sterkere actuator te gebruiken voor deze beweging. Later bleek dat deze nodig was voor het schuifmechanisme. Hierdoor moesten wij de beweging met de kleine actuator doen. Daarom hebben wij veren aan onze grijper gemonteerd om wat last van de actuator weg te nemen.
TEAM GRIJPER
Anna en Annelouk
Bouw: News
Het idee van handtekening van Annelouk hebben we enigszins aangepast op wat het beste voor ons zou werken, hiermee hebben we uiteindelijk twee verschillende spuugmodellen gemaakt. Een waarmee we de werking van de grijper hebben getest en een die we perfect op schaal hebben gemaakt. De laatste is hieronder weergegeven.
Vooraf aan het proefmodel op schaal hebben we de onderdelen uitgetekend gebaseerd op de grootte van de appel. Deze tekening hebben we opgemeten voor de precieze maten van de onderdelen voor de grijper.
Dit spuugmodel is uitermate handig om de maten te bepalen, hierdoor hebben we al vroeg kunnen oplossen dat de grijper de muur niet raakt als deze de appel oppakt. Dat hebben we gedaan door een 'stop' op het systeem te plaatsen. Doordat het proefmodel op schaal is, was de plaats van deze stop makkelijk te bepalen zonder berekeningen.
Ook is te zien dat we de grijphanden rond hebben gemaakt, hier hebben we voor gekozen omdat dit makkelijker om de appel heen past en omdat dit in Solid-Works gemakkelijk te tekenen is.
Aan de hand van het spuugmodel en enkele metingen hebben we dus het PMMA gekregen zoals we dat wilden hebben.
Op de foto hiernaast is het succesvolle resultaat van de gemonteerde versie te zien.
We hebben de elastieken ook schuin geplaatst zodat de grip op de appel verbeterd.
Een nadeel aan ons ontwerp voor de grijper is dat de actuator in de grijper is gebouwd. Dus als we de actuatoren krijgen moeten we deze actuator er telkens opnieuw inbouwen. Dit is kost enige tijd. Hoe we dit doen is te zien in het filmpje hierboven.
Bouw: News
bottom of page