WB-SEXY
HET ONTWERPPROCES
DE OPDRACHT

Het team WB-65 heeft de opdracht gekregen om een mechanisme te ontwerpen dat een appel van onbepaalde grootte kan oppakken en kan verplaatsen over een wand op een naastgelegen plateau. Dit mechanisme moet aangedreven worden door pneumatische actuatoren. Rechts is een afbeelding van de testopstelling van de opdracht te zien en links het basisframe met de pneumatische actuatoren en beugels waarvan gebruik gemaakt mag worden.
Om de opdracht te realiseren krijgen we een plaat PMMA ter beschikking waaruit precieze onderdelen gesneden kunnen worden doormiddel van een lasersnijder.
ANALYSE

Kennismaken
In de eerste week hebben we kennis gemaakt met zowel elkaar als met de opdracht en het ontwerpproces. Iedereen heeft eerst voor zichzelf de opdracht gelezen en vervolgens inspiratie opgedaan door te kijken naar vergelijkbare ontwerpen op internet. De inhoud van de opdracht en de beste voorbeelden die we konden vinden hebben we met elkaar besproken. Twee van de voorbeelden die we hebben besproken zijn hieronder te vinden. Dit hebben we gedaan om te kijken wat er allemaal mogelijk is om de opdracht te voltooien.
Tijdens het analyseren van het ontwerpproces hebben we het gehad over zaken zoals het aantal uren dat we eraan willen besteden, hoeveel geld het maximaal mag kosten en wie welke vaardigheden al bezit. Door dit te bespreken hebben we ook besloten alvast een taakverdeling te maken voor de taken die tijdens het ontwerpproces naar voren zullen komen. De taakverdeling is als volgt: Anton is voorzitter, Anna de notulist, Bram Filé de fotograaf en Annelouk de penningmeester.

Voorbeeld: youtube
Een van de voorbeelden die we uitvoerig hebben besproken is te vinden via deze link: https://www.youtube.com/watch?v=MR8fxyDwzhU, een foto van dit filmpje is ook hierboven te vinden. Het meest interessant hieraan vonden wij de stabiliteit van het ontwerp en de draaibeweging van de grijper door middel van tandwielen. Ook zaten er elastieken aan de grijper waardoor een object ingeklemd kan worden zonder al te veel te beschadigen.

Voorbeeld: plaatje
Deze afbeelding is een goed voorbeeld omdat hier een manier om de actuator aan de grijper te verbinden is weergegeven.
CRITERIA FORMULEREN EN MOGELIJKHEDEN ONTDEKKEN
Programma van Eisen en Wensen
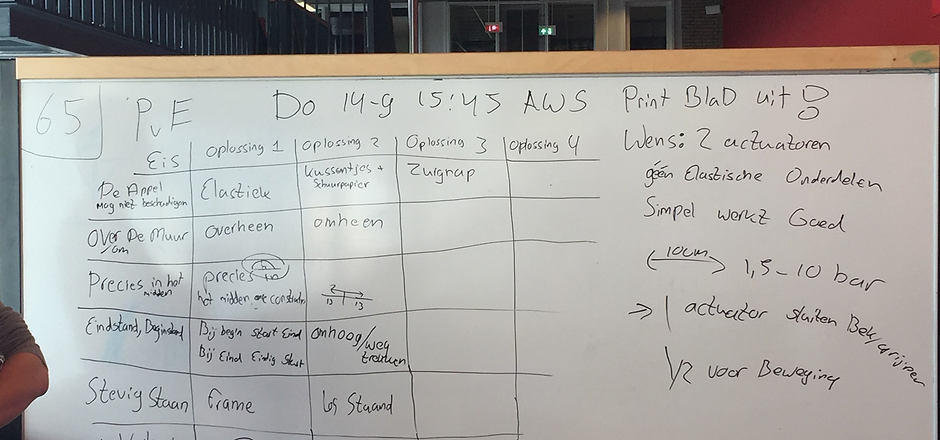
Nu iedereen een goed beeld van de opdracht gecreëerd heeft, hebben we het doel van de opdracht en de criteria concreet geformuleerd aan de hand van een schema voor eisen en wensen. Hierin staan de eisen en wensen en daarnaast ideeën om hieraan te voldoen. Bij het opstellen van dit schema hebben we gebrainstormd op het whiteboard.
Klik op 'Klik Hier' voor het volledige programma van eisen en wensen.

Morfologische kaart
Om alle mogelijkheden voor de opdracht te verkennen zijn we zo veel mogelijk ideeën gaan bedenken voor verschillende mechanismen. De resultaten van deze brainstormsessie hebben we samengevat in de morfologische kaart.
Klik op 'Klik Hier' voor een beter zicht op de morfologisch kaart.
CONCEPTEN EN PROEFMODELLEN
Nu is het tijd om concepten te gaan ontwikkelen. Om tot zo veel mogelijk verschillende concepten te komen en niet in één idee te blijven hangen hadden we besloten dat iedereen een eigen concept zou bedenken en deze kort zou uitwerken. Daarnaast moest iedereen voor het vak handtekenen het grijpsysteem van het mechanisme precies uittekenen. De resultaten per persoon zijn hieronder vermeld. Vervolgens hebben we bij ieders concept de voor en nadelen besproken. Tijdens die bespreking zijn er ook een paar spuugmodellen gemaakt om te kijken of bepaalde mechanismen ook echt werken hoe ze moeten werken.
 HandtekeningAnna.png |  HandtekeningAnnelouk.png |  HandtekeningTibbe.png |
|---|---|---|
 HandtekeningBart.png |  HandtekeningBramFilé.png |  HandtekeningBramSinke.png |
 HandtekeningAnton |
Handtekeningen
 ConceptAnna.png |  ConceptBramFilé1.png |  ConceptBramFilé2_(verdere_uitwerking).png |
|---|---|---|
 ConceptBram Sinke.png |  ConceptAnton 1.PNG |  ConceptAnton 2.PNG |
Concepten
 SpuugmodelGrijper.jpg |  Spuugmodelgrijperopschaal.JPG |  Spuugmodelgrijpermetband.jpg |
|---|---|---|
 SpuugmodelLego.jpg |  SpuugmodelSchaarbeweging.jpg |
Proefmodellen
UITEINDELIJKE ONTWERP

Concepten beoordelen
Om van alle verschillende concepten één uiteindelijk ontwerp te maken hebben we besloten om van ieders concept de beste onderdelen samen te voegen. Om te bepalen wat de beste combinatie is van alle concepten hebben we de concepten verdeeld in drie onderdelen met een eigen functie: de grijper, de arm en de verplaatsing. Vervolgens hebben we alle onderdelen met dezelfde functie onderling vergeleken (totaal hebben we dus drie vergelijkingen gemaakt). Deze vergelijkingen hebben we gemaakt door elk onderdeel een score te geven voor een beoordelingscategorie. Elke beoordelingscategorie heeft van ons ook een weegfactor gekregen. Door de gegeven score te vermenigvuldigen met de weegfactor kreeg een onderdeel een uiteindelijke score. De uiteindelijke scores werden per onderdeel met elkaar vergeleken en het onderdeel met de hoogste score per onderdeel won en kwam in het uiteindelijke ontwerp.
Klik op Klik Hier' voor het volledige beoordelingsproces.

Teams maken
Vanaf dit moment hebben we besloten de groep te splitsen in drie teams, om de drie onderdelen van het mechanisme apart uit te werken. Met uitwerken wordt bedoeld het precies helder hebben hoe het onderdeel het beste gerealiseerd kan worden.
Klik op 'Klik Hier' voor de introductie van de teams.
SolidWorks bestanden
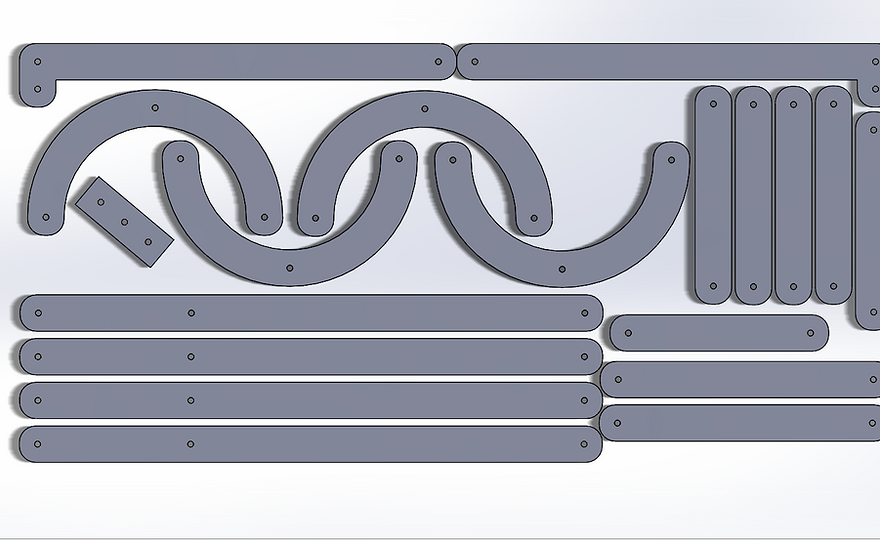
Nadat we in teams de onderdelen hebben uitgewerkt en uitgerekend, hebben we de onderdelen die we uit het PMMA wilden laten snijden in Solid-Works gezet. Omdat alles niet op één plaat paste hebben we het schaarmechanisme uit een tweede plaat laten snijden. Daarom hebben we twee Solid-Works tekeningen ingeleverd. Een daarvan is hierboven is te zien.
Klik op 'Klik Hier' voor het proces dat vooraf aan deze tekeningen ging, ook de de tweede tekening is op deze pagina te vinden.